Autonomous underwater vehicles (AUVs) are unmanned underwater robots controlled by an operator or pre-programmed to explore different waters autonomously. These robots are usually equipped with cameras, sonars, and depth sensors, allowing them to autonomously navigate and collect valuable data in challenging underwater environments. Unlike remotely operated vehicles (ROVs), AUVs do not require continuous input from operators, and with the development of AI, those vehicles are more capable than ever. AI has enabled AUVs to navigate complex underwater environments, make intelligent decisions, and perform various tasks with minimal human intervention.
In this article, we’ll delve into AI in AUVs. We’ll explore the key AI technologies that enable them, examine real-world applications, and a hands-on tutorial for obstacle detection.
About us: Viso Suite is the end-to-end platform for building, deploying, and scaling visual AI. It makes it possible for enterprise teams to implement AI solutions like people tracking, defect detection, and intrusion alerting seamlessly into their business processes. To learn more about Viso Suite, book a demo with our team.
AI Technologies for Autonomous Underwater Vehicles (AUVs)
Artificial intelligence (AI) and machine learning (ML) have been transforming various industries including autonomous vehicles. Whether it is self-driving cars or AUVs, AI technologies like computer vision (CV), provide abilities that take those ideas to reality. CV is a field of AI that enables machines to understand through vision. There are multiple ways a machine can “see”, this includes techniques like depth estimation, object detection, recognition, and scene understanding. This section will explore the AI technologies engineers use for autonomous underwater vehicles.
Computer vision (CV)
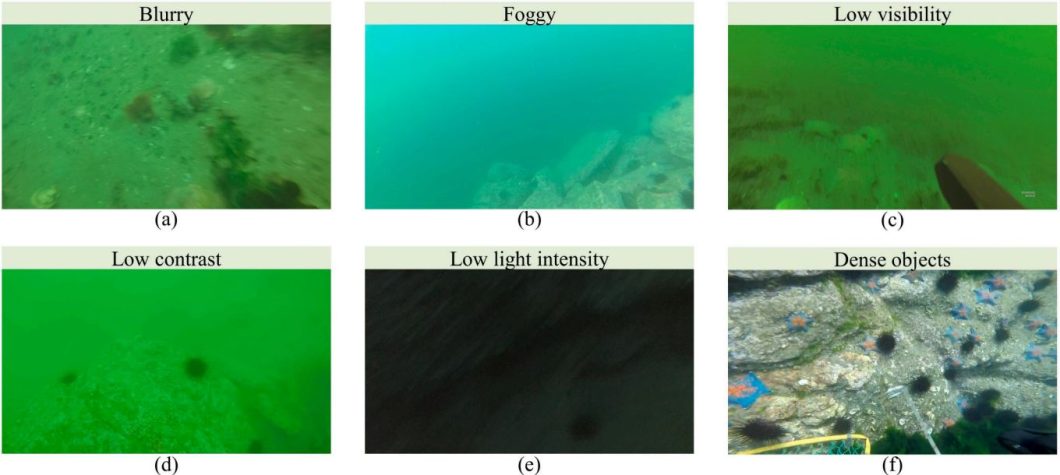
Computer Vision is one of the main AI applications in AUVs. There are a lot of things to consider with underwater vision, it is a challenging task and there are several factors that can affect this vision. Underwater, objects are less visible because of lower levels of natural illumination because light travels differently underwater. So, high-quality cameras capable of capturing clear images in low-light conditions are a requirement for effective computer vision. Furthermore, the depth level not only affects the vision but also affects the hardware. Deep waters have high pressures and equipment must be able to withstand that.